原点に対して空間反転の操作を行えば、 にあった座標は
にあった座標は  へ移される(原点について点対称)。 これは量子力学などの物理ではパリティ変換(反転)として知られ、空間座標の符号を変換する。
へ移される(原点について点対称)。 これは量子力学などの物理ではパリティ変換(反転)として知られ、空間座標の符号を変換する。
たとえば、原子に一様な電場をかけた場合にエネルギー準位が分裂する(シュタルク効果)を考える際にもこの対称性は使われる。
空間反転
直交座標と極座標の場合について見ていく。
直交座標の成分
空間反転により  と変換される。
と変換される。 を直交座標系で書くと、空間反転の操作
を直交座標系で書くと、空間反転の操作  により
により

に移される。この操作 を3 3の行列で表現すれば
3の行列で表現すれば

である。 となる。通常の軸周りの回転を表す行列
となる。通常の軸周りの回転を表す行列  ,
,  ,
,  を組み合わせて を作ることはできない。なぜなら、
を組み合わせて を作ることはできない。なぜなら、

は  であるためである。たとえば、直交行列に関して行列式の性質から
であるためである。たとえば、直交行列に関して行列式の性質から
![\begin{eqnarray*} {\rm det}[R_xR_yR_z]={\rm det}R_x\cdot {\rm det}R_y \cdot {\rm det}R_z=1 \end{eqnarray*}](https://batapara.com/wp-content/ql-cache/quicklatex.com-3c2734538082ecc01887552922912082_l3.png "Rendered by QuickLaTeX.com")
となる。
極座標の成分
を極座標表示で表すと

この式から  がどのように変換されるか見ていく。そのあとで、図を書いて の関係を見ていく。
がどのように変換されるか見ていく。そのあとで、図を書いて の関係を見ていく。
空間反転に対してベクトルの大きさ変化しない ( ) ので
) ので  である。次に
である。次に  について見てみると、
について見てみると、 成分について
成分について  でないといけない。
でないといけない。 は変化しないので、
は変化しないので、

である。したがって、 と変換される。最後に
と変換される。最後に  について見ていく。
について見ていく。 成分が
成分が  となるためには、
となるためには、

でなくてはならない。したがって、 となる。
となる。
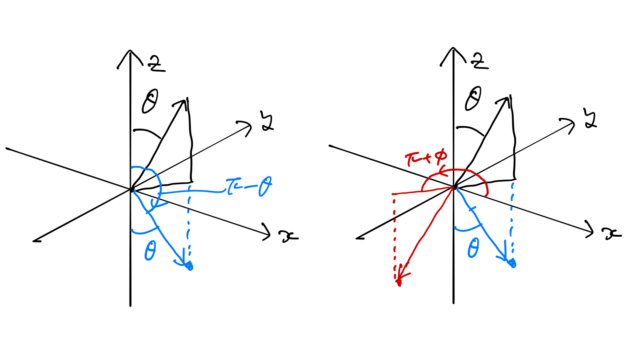
これらの結果をまとめると極座標について

となる。このことを下の図に表した。まず、 平面に対して反転操作を行い(左図)、 軸に対して反時計回りに
平面に対して反転操作を行い(左図)、 軸に対して反時計回りに  回転すれば(右図)、空間反転に対応することが確認できる。この操作はその性質上、 軸回転から始めて、 平面の反転をとっても同様の結果になる。
回転すれば(右図)、空間反転に対応することが確認できる。この操作はその性質上、 軸回転から始めて、 平面の反転をとっても同様の結果になる。
パリティ
以下ではパリティ反転(空間座標を反転させる操作)を表す演算子を  とする。つまり、ある関数
とする。つまり、ある関数  に対して
に対して

となる演算子 について考える。
* 式(1)は固有値方程式ではない。固有値方程式は  の形で、両辺に現れる関数は同じ形でないといけない。以下では、 の固有値・固有関数を考える。
の形で、両辺に現れる関数は同じ形でないといけない。以下では、 の固有値・固有関数を考える。
固有値・固有関数
の固有値  を考える。固有関数を
を考える。固有関数を  とすると
とすると

である。両辺にさらに を左から作用させて、

式(1)より  を用いると、左辺は
を用いると、左辺は

となる。したがって、 から
から  となる。固有値 に対して固有関数
となる。固有値 に対して固有関数  と書くと、
と書くと、

一方、式(1)より  の関係を用いて左辺を書き直すと
の関係を用いて左辺を書き直すと

これより、 は偶関数(パリティが偶)、
は偶関数(パリティが偶)、 は奇関数(パリティが奇)となる。任意の関数はこの2つの
は奇関数(パリティが奇)となる。任意の関数はこの2つの  で展開することができ、完全系をなす。
で展開することができ、完全系をなす。
水素原子のハミルトニアンとの交換関係
水素原子のシュレディンガー方程式について、電子の受けるポテンシャルは原子からのクーロンポテンシャルのみで球対称になっている。したがって、ポテンシャルは  の関数であり、角度によらないポテンシャルになる。
の関数であり、角度によらないポテンシャルになる。
直交座標系で書いたハミルトニアンは、

となる。ここで、空間反転  について球対称ポテンシャルは以下のように形を変えない。
について球対称ポテンシャルは以下のように形を変えない。

また、 などの部分について、
などの部分について、
![\begin{eqnarray*} \frac{\partial^2}{\partial x^2}\to\frac{\partial}{\partial (-x)}\left[\frac{\partial}{\partial (-x)}\right]=+\frac{\partial^2}{\partial x^2} \end{eqnarray*}](https://batapara.com/wp-content/ql-cache/quicklatex.com-97456403cc0eb0837757e51deac0be4b_l3.png "Rendered by QuickLaTeX.com")
より、空間反転に対して不変である。したがって、上の  は空間反転に対して不変である。極座標表示したハミルトニアンでも同様の結果になる。ハミルトニアンが空間反転に対して不変であるので、交換関係は
は空間反転に対して不変である。極座標表示したハミルトニアンでも同様の結果になる。ハミルトニアンが空間反転に対して不変であるので、交換関係は
![\begin{eqnarray*} [{\hat{\mathcal P}},\hat{\mathcal H}]=0 \end{eqnarray*}](https://batapara.com/wp-content/ql-cache/quicklatex.com-f29b799c789ef1b1e67778303beda108_l3.png "Rendered by QuickLaTeX.com")
となる。
![[{\hat{\mathcal P}},\hat{\mathcal H}]=0](https://batapara.com/wp-content/ql-cache/quicklatex.com-96eda97e6d8febdcc36f57f42e943d87_l3.png "Rendered by QuickLaTeX.com") を示す。
を示す。
まず
の固有関数を  とする。このとき、 が空間反転に対して対称なので
とする。このとき、 が空間反転に対して対称なので

である。また、
 であるため、
であるため、

となり、
となる。
 が交換するため と は同時固有状態をもつ。 の固有状態は、水素原子における電子の波動関数 であり、動径波動関数
が交換するため と は同時固有状態をもつ。 の固有状態は、水素原子における電子の波動関数 であり、動径波動関数  と球面調和関数
と球面調和関数  の積で表されていた。したがって、 の固有関数である
の積で表されていた。したがって、 の固有関数である  は の固有関数でもある(同時固有状態)。よって
は の固有関数でもある(同時固有状態)。よって

となる。波動関数のパリティ( が偶関数か奇関数か)によって固有値 が異なる。あとで示されるように  であり、パリティは量子数
であり、パリティは量子数  のみ依存することがわかる。
のみ依存することがわかる。

 に対応する
に対応する  軌道、
軌道、 軌道、
軌道、 軌道はそれぞれ同じ で指定される球面調和関数 の線形結合で表される。したがって、上のパリティはそのまま、
軌道はそれぞれ同じ で指定される球面調和関数 の線形結合で表される。したがって、上のパリティはそのまま、 軌道のパリティに対応する。たとえば、
軌道のパリティに対応する。たとえば、 の 軌道, 軌道に対しては偶パリティで、
の 軌道, 軌道に対しては偶パリティで、 の 軌道,
の 軌道,  軌道は奇パリティである。
軌道は奇パリティである。
球面調和関数のパリティ
最後に、 となることを示す。 の空間反転において、 より動径関数 は偶関数となる。これより
より動径関数 は偶関数となる。これより

について  に対する偶奇を調べる。まず、
に対する偶奇を調べる。まず、

となる。次にルジャンドル陪多項式  について考える。ルジャンドル多項式
について考える。ルジャンドル多項式  はロドリゲスの公式より
はロドリゲスの公式より

と書ける。 を用いて  は
は

となる。 に対して、
に対して、

となる。この結果と(2)より は  に対して
に対して

となる。これより
