四重極モーメントについて学ぶ。双極モーメントについて理解されていることが望ましい。なぜなら、四重極モーメントは双極モーメントが0の場合に特に重要になるからである。
目次
1. 四重極モーメント
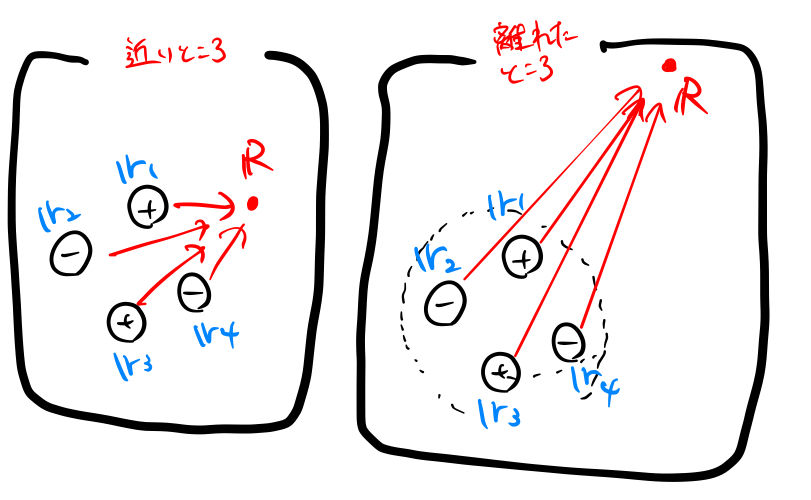
双極モーメントの繰り返しになるが、どのような状況のときに現れる項か知っておいた方が良い。双極モーメントは下図(右)のように電荷がある系から離れたところにおける、スカラーポテンシャルの第1近似であった。
1.1 スカラーポテンシャルの多重極展開
座標原点を点線内に取ると、点線で囲んだ領域の電荷が  につくるポテンシャルは、
につくるポテンシャルは、

と表すことができる。これを  と仮定して展開して行った時の、2次の近似が四重極モーメントに対応するポンテシャルである。以下のように
と仮定して展開して行った時の、2次の近似が四重極モーメントに対応するポンテシャルである。以下のように  で展開しよう(多重極展開)。
で展開しよう(多重極展開)。

 で展開したので
で展開したので  は に比例する。双極モーメントに対応する
は に比例する。双極モーメントに対応する  は
は  に比例する。四重極モーメントに対応する
に比例する。四重極モーメントに対応する  (四重極ポテンシャル)は
(四重極ポテンシャル)は  に比例する。
に比例する。
1.2 第一項
展開した時の第1項は  であった。これは、点線の領域内の電荷の和
であった。これは、点線の領域内の電荷の和  を全電荷とする粒子を原点に置いて、その粒子が に作るポテンシャルに等しい。
を全電荷とする粒子を原点に置いて、その粒子が に作るポテンシャルに等しい。
とにかく第0近似の では各電荷の位置を無視して、 へ作るポテンシャルを考える粗い近似である。実際、各電荷が原点からずれていれば各電荷の位置  に依存するが、遠くから見たら無視できるのである。
に依存するが、遠くから見たら無視できるのである。
1.3 第二項(双極モーメント)
第二項は、双極モーメント  とすると、
とすると、

となる。grad が  に作用するので、 は
に作用するので、 は  に比例する。(分数関数の微分
に比例する。(分数関数の微分  と同様である。)
と同様である。)
これがモーメントと言われるゆえんは、 が原点からの距離と電荷(重み)の積になっているからである。
が原点からの距離と電荷(重み)の積になっているからである。
1.4 第三項(四重極モーメント)
このモーメントは前述した、 と が 0 のときに重要な項である。これらが  のときの条件は、
のときの条件は、
- 全電荷が0
- 双極モーメントが0
つまり、

である。さて、 は  の展開における2次の項であった。したがって、
の展開における2次の項であった。したがって、

となる。(2変数関数  のテイラー展開を思い出してほしい。)ここで、
のテイラー展開を思い出してほしい。)ここで、 は全電荷についてとり、小文字
は全電荷についてとり、小文字  などは点線の中の電荷の位置
などは点線の中の電荷の位置  の成分、大文字
の成分、大文字  などは の成分を表す。
などは の成分を表す。
このポテンシャルには6個の量  が現れる。しかし、 はポアソン方程式を満たすため、つまり、
が現れる。しかし、 はポアソン方程式を満たすため、つまり、

ここで最後の行ではクロネッカーのデルタを用いて  ごとに偏微分することを明記した。このポアソン方程式のために、独立な変数は
ごとに偏微分することを明記した。このポアソン方程式のために、独立な変数は  個になる。この0となる項を適当な係数をつけて の中に入れ込むと、
個になる。この0となる項を適当な係数をつけて の中に入れ込むと、

と書くことができる。この式に現れるテンソルを四重極モーメントという。

2. 四重極モーメントの性質
上で定義した四重極モーメントは、 の成分を持ったテンソル
の成分を持ったテンソル  である。体格成分の和
である。体格成分の和  は 0になる。これは、ポアソン方程式を満たすところから来ている。また、先に述べたように、独立な成分は5つである。
は 0になる。これは、ポアソン方程式を満たすところから来ている。また、先に述べたように、独立な成分は5つである。
2.1 1/R を2階微分する
次に、 をみる。
をみる。 に注意して、まずは
に注意して、まずは  で1階微分する。
で1階微分する。

続いて、この結果をさらに  で1階微分する。
で1階微分する。

また、 について、
について、

以上の結果をまとめると、

2.2 四重極モーメントで表すポテンシャル
上の結果から具体的に、ポテンシャル を求める。
![\begin{eqnarray*} \varphi^{(2)} &=&\frac{D_{ik}}{6}\frac{\partial^2}{\partial X_i \partial X_k}\left(\frac{1}{R}\right) \\ \\ &=& \frac{D_{ik}}{6}\,\left[ \frac{3X_i X_k }{R^5} - \frac{\delta_{ik}}{R^3}\right] \\ \\ &=& \frac{D_{ik}X_i X_k}{2R^5} \quad (\because D_{ii}=0) \end{eqnarray*}](https://batapara.com/wp-content/ql-cache/quicklatex.com-69cdfb49b6d0a1ef022ef06348e07661_l3.png "Rendered by QuickLaTeX.com")
このテンソル  を対角化したときにでる3つの固有値のうち独立なものは2つである。なぜなら、 の対角要素の和 (
を対角化したときにでる3つの固有値のうち独立なものは2つである。なぜなら、 の対角要素の和 ( ) であるため、 の固有値
) であるため、 の固有値  となる。
となる。
3. まとめ
双極モーメントや四重極モーメントの導出は、ポテンシャルの展開により出てきたのであった。さらに高次の項も取ることが可能で、一般的にはこのような展開を多重極展開という。よく使うであろう、双極モーメント・四重極モーメントはおさえておきたい。